Ультразвуковой сенсор V1.0
Автор: Dryundel
USonicV1.0 - блок для работы с ультазвуковыми датчиками HC-SR04, SRF05, SRF06, DYP-ME007, JSN-SR04T & Parallax PING
Совместим со всей линейкой Arduino (и клонами), семейством Teensy (включая 96Mhz 32 bit Teensy 3.2) и микроконтроллерами, отличными от AVR.
Особенности:
- Измерение расстояния до 30 раз в секунду (минимальное время паузы между измерениями 29мс)
- Может работать на одном пине (кроме SRF06) для этого в насторйках пользователя для TRIGGER_PIN и ECHO_PIN указать один и тот же пин.
- Может расчитывать медиану (среднее значение) пакета измерений для более точных показаний.
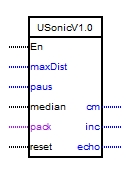
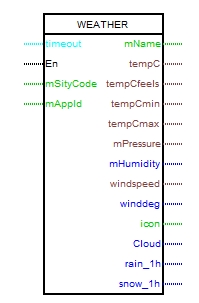
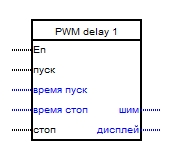
Входы блока:
En - включение блока
maxDist - максимальная дистанция измерения (при превышении дистанции выводится "0")
paus - пауза между измерениями
median - включение функции расчета медианы (среднего значения пакета измерений)
pack - количество измерений в пакете для расчета медианы
reset - сброс показаний (Вход En является приоритетным) *
* Если на входах En и reset одновременно присутствует высокий уровень сброса показаний не происходит.
Выходы блока:
cm - расстояние в сантиметрах
inc - расстояние в дюймах
echo - время пинга (эхо-отклика) в микросекундах
Использована библиотека NewPing v1.9.1 https://bitbucket.org/teckel12/arduino-new-ping/downloads/