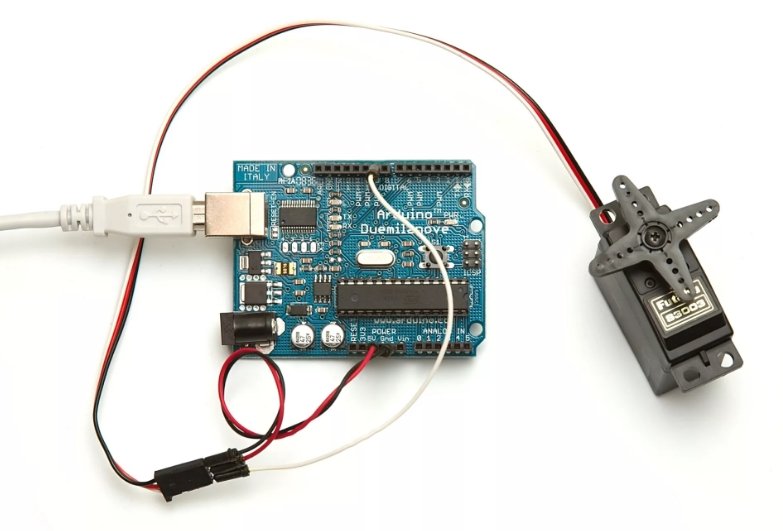
flprog блоки для управления сервоприводом
flprog блоки для управления сервоприводом
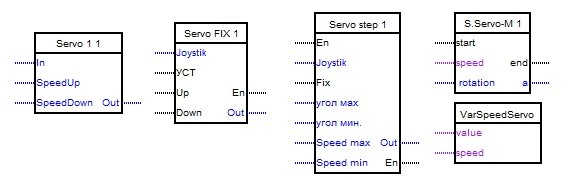
"In" - вход установки угла поворота
"SpeedUp" - вход установки прямой скорости (более 50 - очень медленно)
"SpeedDown" - вход установки обратной скорости (более 50 - очень медленно)
"Out" - выход на встроенный блок ServoMotor
https://forum.flprog.ru/viewtopic.php?f=46&t=6168&p=85298&hilit=%D1%81%D0%B5%D1%80%D0%B2%D0%BE#p85298
Блок предназначен для управления сервоприводом из стандартной библиотеки. Расчитан на подключение одной оси стандартного джойстика. Блок позволяет перемещать привод в одном и другом направлении с фиксацией последнего положения после отпускания джойстика. Есть ограничение нижней границы положения привода до 10 градусов для избежания дребезга в крайнем положении. Блок имеет настройки верхней и нижней границы положения, а так же установку заранее заданного угла по входу. Возможно управление кнопками Up / Down без джойстика.
Блок управления скоростью и угла поворота сервоприводами.
Используется совместно с блоком управления сервомоторами и блоком управления сервоприводом через микросхему расширения PCA9685.
© vacz
Входы:
start - пуск. (кратковременный сигнал-1).
speed - установка скорости. (1 - 255, чем ниже число, тем выше скорость).
rotation - задание угла поворота (от 1 - до 360 градусов).
Выходы:
end - режим работы блока. ( при работе блока на выходе появляется "0", по окончании работы "1").
a - выход сигнала на сервопривод.
ВНИМАНИЕ: При совместном использовании с блоком "Дисплеи", блоки дисплея должны быть отключены на время работы блока "SpeedServo"!
Во избежание потери скорости.
Блок управления сервомотором -положение и скорость.

Комментариев 0